Edge Detection
- Goal: 급격한 변화(불연속성등)을 파악하는 것
- 장점: More compact than pixels
Edge Detection을 통해 얻을 수 있는 것들
1. 정보추출
2. 물체인식
3. Recover geometry and viewpoint
Edge Detection에 방행되는 요인
illumination 효과 (음영효과)
Edge 구성요소
1. Edge direction: intensity가 증가하는 방향에서 직교하는 방향
2. Edge strength: intensity 변화의 정도
--> 0~255 vs. 10~20 중 앞에것이 edge strength가 더 큼
3. Edge position: the image position at which the edge is located
Origins of edges
1. surface normal discontinuity(표면의 법선의 불연속성)
2. depth discontinuity
3. surface color discontinuity
4. illumination discontinuity
Characterizing edges
1차미분 또는 2차미분을 통해 검출 함


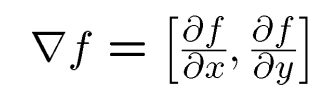
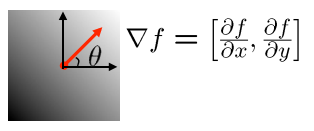
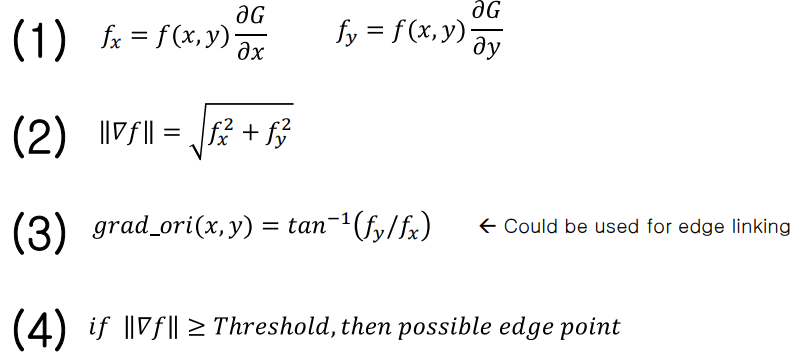
Image gradient
gradient vector는 intensity가 급격히 증가하는 방향 (edge direction과 수직인 방향)
edge normal = gradient direction = gradient vector = intensity가 증가하는 방향
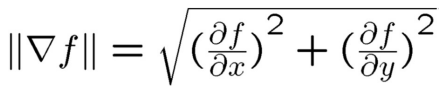
Edge strength는 아래와 같음
Effect of noise
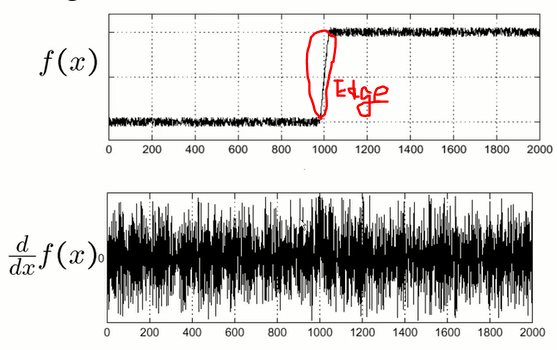
위에 적용된 Finite difference filters(한계가 있는 서로다른 필터)는 noise에 강하게 응답함
--> smoothing 기법을 적용하여 noise 억제
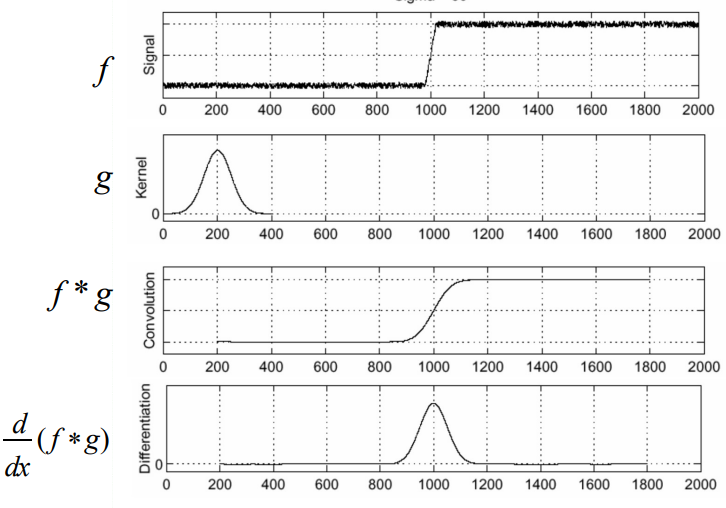
더 간단히, 아래와 같이도 표현 가능함

Smoothing 필터의 종류
1. Prewitt operator
2. Sobel operator
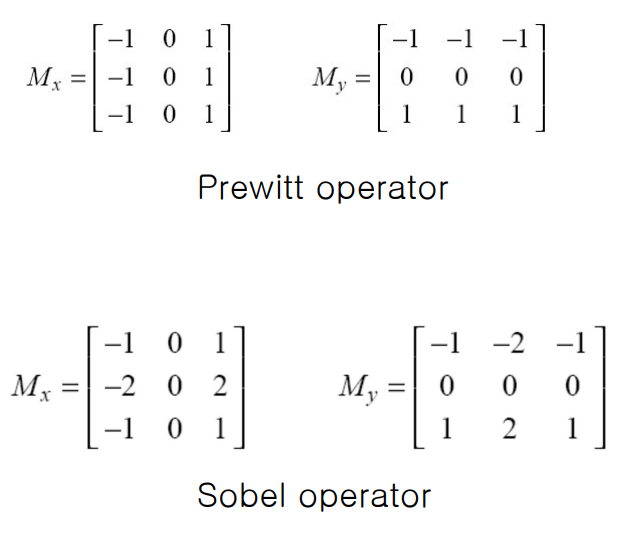
Preweitt/Sobel operator를 사용 후, gradient값을 얻을 수 있음.
Edge Detection step
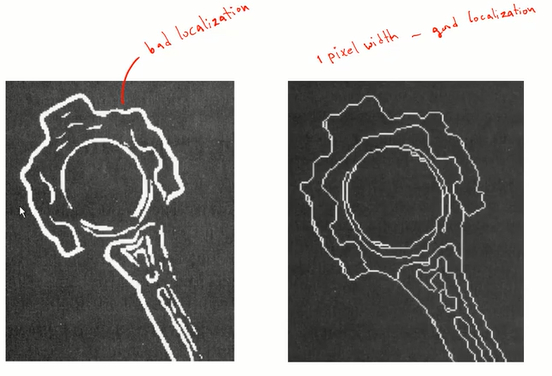
Noise suppression - localization tradeoff
localization: edge가 넓은 범위에 걸쳐나오는 것의 여부
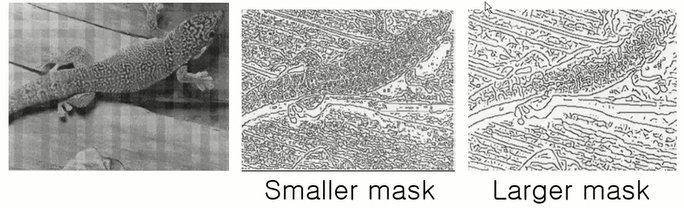
Lage mask를 통해 noise는 감소시킬 수 있지만,
edge가 넓은 범위에 걸쳐나오므로 localize(경계선 파악이)가 어려움
mask사이즈는 시그마에 비례함
Edge thinning and linking
adaptive threshold: 구간별로 서로 다른 threshold를 사용하는 것
smoothing - localization tradeoff
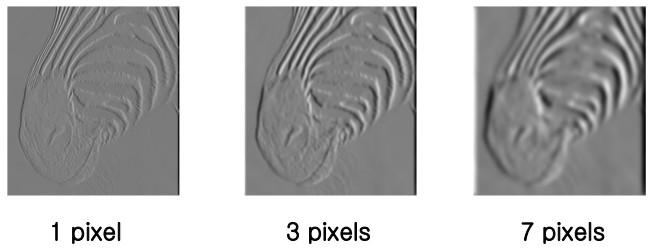
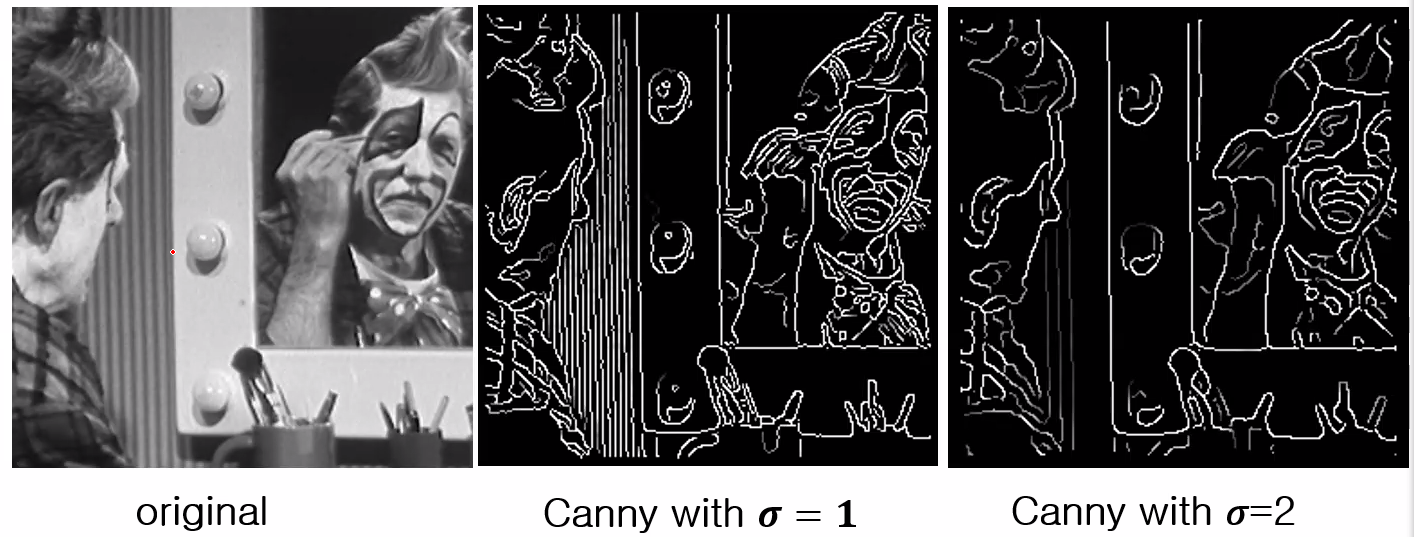
smoothing kernel = gaussian 필터의 sigma 크기 = scale
smoothing kernel이 클수록 noise를 줄일 수 있지만 edge가 blur해진다는 단점이 있음
edge detection 성능평가
TN는 잘 사용 안함
왜냐하면 edge외에는 모두 TN이므로
single response: true edge point로 one point의 값을 return하는 것
Canny Edge Detector
많이 쓰이고 있는 edge 검출 방법
1. Compute Gradients (그다음, 0~1, 0~255로 scaling해줌)
--> image가 갖는 범위는 0~255
--> 이값을 미분해서 나온 값이 가질수 있는 범위는 0~255
--> gradient magnitude값에 따라 min값은 0, max는 sqrt(255^2+255^2)
--> 그러므로 다시 이 max값을 0~255로 scaling 해줘야함
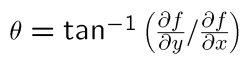
2. Get Orientation at Each Pixel

tangent함수에서 불연속성인 부분을
연속성있게(그림에서도 연속성있게) 해주기 위해 atan2로 사용함
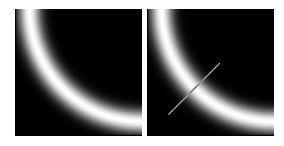
3. Non-maximum suppression
edge와 가장 비슷한 가운데 흰색 선 외에 부분들은 제거 하는 것
(edge가 두꺼울때 thining하게 해주는 것)
4. Edge linking(끊어진 edge 연결)
5. Hysteresis thresholding
2가지 값(high/low)의 threshold를 사용
threshold보다 훨씬 큰 값을 가진것에서 connection파악하여
low threshold보다 큰 값을 가진 약한 edge를 강한 edge와 연결함
ROC커브, DET커브
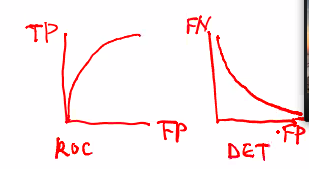
ROC: Receiver Operating Characteristic curve
DET: Deterministic Error Tradeoff
해당 내용은 서강대학교 영상처리분석과목을 정리한 내용입니다.
'IT > 영상처리분석' 카테고리의 다른 글
| Face Detection (0) | 2022.05.23 |
|---|---|
| 여러 종류의 Feature descriptor (0) | 2022.05.16 |
| keypoint detection - Harris, SIFT, SURF, LIFT (0) | 2022.04.18 |
| Line & Ellipse detection (0) | 2022.04.17 |
| 컬러 이미지 처리 (1) | 2022.03.21 |